版权所有 深圳真李王朝贸易有限公司 粤ICP备16026446号
联系电话:15173619381 联系手机:15173619381 E-MAIL:www.51xipan.com 邮政编码:400042 公司地址:广东省东莞市寮步镇寮东路
深圳真李王朝贸易有限公司专业生产吸盘20年,为您提供CPSR海绵吸具/真空吸盘/海绵吸盘/玻璃吸盘等吸具吊具.
以板材加工过程中用于板材搬运的机械手为研究对象,分析了该机械手的本体结构。机械手采用气动真空吸盘作为机械手的末端执行器,有4 个自由度。详细阐述了其末端执行器关键参数的设计计算。实践证明,该机械手能完成满足生产线的要求。
随着工业生产规模的不断扩大,生产线的自动化水平须大力提高,特别是在高温、重载、大噪声等恶劣的工作环境中,人工操作劳动强度大,易发生安全事故[1]。某公司的板材生产线上,板材经熔化后压铸成形,再进行粗切割, 切割后需把板材搬运到指定框架中。因工件重、形状大,所以人工搬运效率低,所需员工多,且易发生碰撞,影响板材的后续加工。所设计的工业机械手采用真空吸盘作为机械手的末端执行器, 利用真空吸附方式抓取工件,可自动搬运板材[2]。
该机械手的作用是将粗切割后的板材(约10kg)从工作台上搬运到堆放架内,要求叠放有序,不能碰撞。结构上要求能实现X、Y、Z 三个方向的移动,且Z 轴能旋转,结合实际生产线情况,真空技术网(http://www.chvacuum.com/)认为机械手要达到以下要求[3]:
(1)分升降机构、横移机构、抓放机构三个机构;
(2)升降机构设计:直线升降,采用滚珠丝杠传动,用直线光杆导向,上下升降速度最快50mm/s,升降行程范围0~1 800mm,最大承载力1 000N;
(3)横移机构设计:X、Y 两个方向横移,采用滚珠丝杠和同步带传动,移动速度最大50mm/s,移动行程范围0~3 500mm,最大承载力1 000N;
(4)抓放机构设计:采用气动方式进行工件的抓放,总最大吸附力250N。
该工业机械手由支架、手臂和手爪组成,4 个自由度分别为:X、Y、Z 三个方向的移动和Z 轴旋转,图1 为设计的机械手总体结构图。总体设计思想为:X、Y、Z 三个方向采用伺服电机驱动,通过丝杠、同步带、轮系等机械机构进行间接传动,末端执行器为气动吸盘手爪,可通过改变吸盘位置实现不同形状工件的抓放。
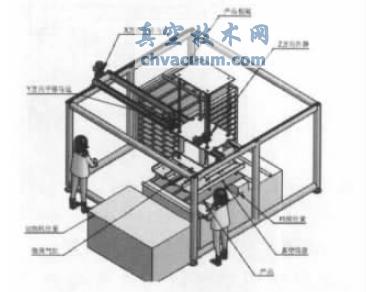
图1 机械手示意图
以把工件从位置1 搬运到位置2 为例, 机械手从原点位置开始,X 轴伺服电机运转带动装在输出轴上的同步带一起旋转, 经同步带传动带动与X 轴平行的轴旋转,从而驱动机械手工作平台在X 轴方向移动,紧接着Y 轴伺服电机运转带动机械手平台在Y 轴方向移动, 然后Z 轴伺服电机运转带动手爪下移从位置1 抓取工件;手爪上升沿X 方向后退,Y 轴伺服电机运转带动机械手平台在Y 轴方向移动到达位置2 上方,Z 轴伺服电机运转带动手爪下移放工件[4]。
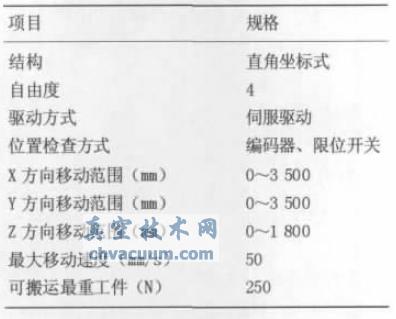
表1 为气动吸盘式工业机械手的参数。
表1 机械手参数
如图2 所示, 首先将真空吸盘通过接管与真空设备(如真空发生器等)接通,然后与待提升物如玻璃、纸张等接触,起动真空设备抽吸,使吸盘内产生负气压,从而将待提升物吸牢,即可开始搬送待提升物。当待提升物搬送到目的地时,平稳地充气进真空吸盘内,使真空吸盘内由负气压变成零气压或稍为正的气压, 真空吸盘就脱离待提升物, 从而完成了提升搬送重物的任务[5]。
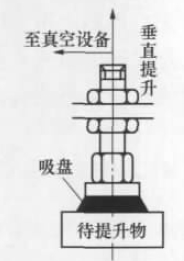
图2 吸盘工作原理图
被搬运物体的重量决定吸盘的大小和数量, 根据生产线作业要求,吸盘工作时为水平吊状态,吸盘直径参数的计算公式如下[6]:

式中D - 吸盘的理论直径,mm;m - 需吸工件质量,kg;t - 安全系数(水平吊t≥4,垂直吊t≥8);p - 吸盘内的真空度,MPa;n - 吸盘数量。
生产线上需搬运工件的重约100N, 吸盘工作时为水平吊,t 取4,真空度p 取0.06MPa,如单个吸盘吸附n取1,代入式(1)中计算,得:
D≥92.16mm
因为实际可选择的直径尺寸范围在50mm 以内,考虑实际工件的形状,在满足需要的条件下,吸盘尺寸应尽可能小,所以增加吸盘数量n,取n=16,代入式(1)中计算,得:
D′≥23.04mm
结合吸盘直径标准取值表,取D=25mm。
根据吸盘提升力的计算公式:

式中W - 吸盘提升力,N;T - 安全系数(在此取T 为1);S - 吸盘面积,cm2。
以规格为D =10mm、16mm、20mm、25mm、32mm、40mm、50mm 为例, 根据公式(2) 分别计算出它们在-400mmHg、-500mmHg 和-600mmHg 真空度下的提升力,计算结果如表2 所示。
表2 吸盘水平提升力(N)
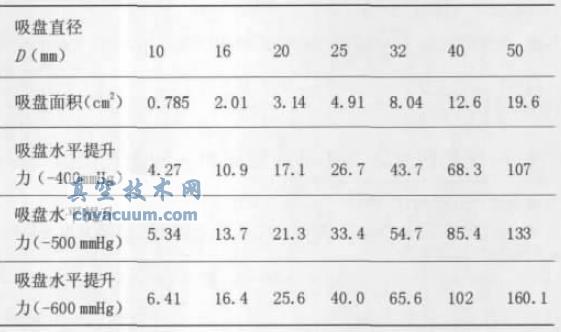
实际使用时,[W]=WT(3)式中[W]为许用提升力,根据经验值,安全系数一般取2.5,现在取D=25mm 的吸盘进行许用提升力的检验计算,在真空度比较低的情况下(-400mmHg),将表1中的数值26.7N 代入式(3),计算得[W]=10.68N。机械手共16 个吸盘,总许用提升力为170.88N>100N,由此可得,在保证安全的情况下,设计计算所得数据能确保提升待搬运工件。
通过对工业机械手本体机构的关键零部件进行设计计算, 并将该气动吸盘式工业机械手在实际生产线上进行调试运行后[7],证实机械手能对工件进行自动抓放动作,且在抓放过程中不发生碰撞,实践证明使用该机械手后,企业现场工作人员数量降低了50%,在降低了劳动力成本的同时提高了生产率。
参考文献
[1] 初晓旭,陈文军.浅谈气动密封的设计[J].液压气动与密封,2012,(2):11-13.
[2] 张海英,陈子珍,翟志永.基于PLC 的物料搬运机械手设计[J].机械工程师,2010,(9):83-84.
[3] 候博,阎明印,王世杰.芯片搬运机械手设计[J].机械设计与制造,2011,(10):35-36.
[4] 张海英.基于PLC 的注塑机机械手控制系统设计[J].机械工程师,2011,(11):72-73.
[5] 钟文,阎秋生,潘继生,等.圆片提升机的结构设计[J].机电工程技术,2011,40(7):60-62.
[6] 张兴国,倪远征,张磊.禽蛋吸运分级机械手设计及研究[J].制造业自动化,2011,33(7):1-4.
[7] 王建军.搬运机械手及PLC 控制系统设计[J].液压气动与密封,2010,(10):16-18.
全国统一服务热线
15173619381我们的邮箱
www.51xipan.com版权所有 深圳真李王朝贸易有限公司 粤ICP备16026446号
联系电话:15173619381 联系手机:15173619381 E-MAIL:www.51xipan.com 邮政编码:400042 公司地址:广东省东莞市寮步镇寮东路
深圳真李王朝贸易有限公司专业生产吸盘20年,为您提供CPSR海绵吸具/真空吸盘/海绵吸盘/玻璃吸盘等吸具吊具.
在线客服
